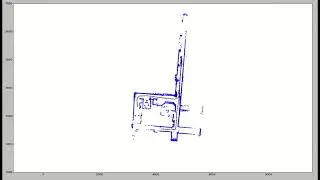
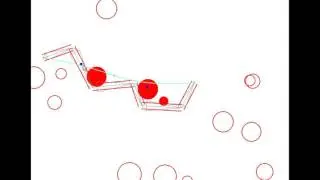
LIDAR only SLAM algorithm .
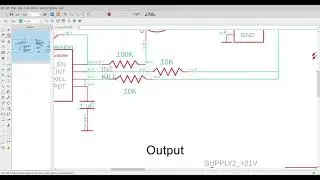
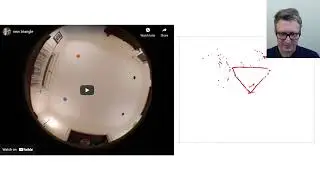
This is example output from a SLAM (Simultaneous Location And Mapping) algorithm that I helped write that uses data from a planar LIDAR (a device that finds distances to the nearest object in a 360 degree sweep). The LIDAR module was mounted on top of a mobile robot that was remotely operated. This algorithm was developed in MATLAB and then ported to Python. It only uses LIDAR data to perform the mapping. No wheel encoders or other sensor data was used. Total distance traveled is several hundred feet. Strictly speaking, the 'LIDAR' used was actually a structured light sensor but is functionally similar. The specific module used was a RPLIDAR A2, which is an inexpensive LIDAR-like module. It was chosen because of its size and how inexpensive it is.
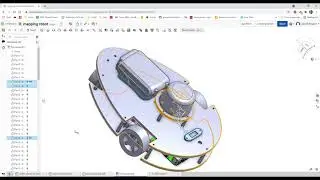
(Update 20 Dec 2021) A lot of people have asked that I post source code for this. I'm not going to do that. I'm cooking up something better and will be posting that code instead! I have a small robot that I am working on currently that also uses the RPlidar A2 to allow me to play around with other mapping algorithms. Check out http://www.robotbrigade.com/mappingRo... for videos and pretty much all of the information you need to make one of your own.