Starting your nodes when the robot boots
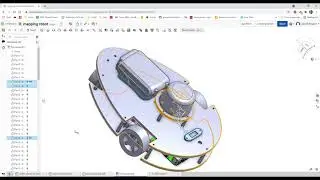
This video is part of a series of videos about an open source mapping robot that I am working on. In this video, I talk about four different ways that you can get your nodes to run automatically when your robot boots up.
If you would like to build a robot like this for yourself, you can find all design files, and links to other resources at http://www.robotbrigade.com/mappingRo...