This is an inverse kinematics solver that I wrote that attempts to avoid obstacles. It was written in C#.
How to use Meme Generator App
00:00:00
3 (8). Образование СССР. Красная школа. История России, выпуск 48
Guitar Hero VS Autoclicker
end of dome and start a free for all
#62 Wie du dein Gehalt in 2025 verdoppelst: Anleitung für Dezember 2024!
DreamWorks Animation Logo (2004-2006) Remake
🧛Вампир Носферату в Red Dead Redemption 2 😱
VLOOKUP use on Google Sheets
Robogames entry
Starting your nodes when the robot boots
Restarting things...
Open Source Mapping Robot - ROS2 Bags
Open Source Mapping Robot - Running ROS2 Nodes
Open Source Mapping Robot - RPlidar node
Open Source Mapping Robot - ROS2 MCU node
Open Source Mapping Robot - Raspberry Pi setup
Open Source Mapping Robot - Velocity controller
Open Source Mapping robot - PWM
Open Source Mapping Robot - OLED display
Open Source Mapping Robot - MCU Quadrature Decoder Software
Open Source Mapping Robot - MCU main program
Open Source Mapping Robot - Bill of Materials
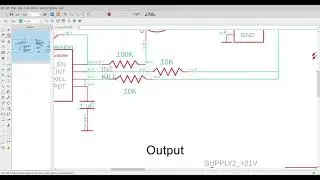
Open Source Mapping robot - Electronics
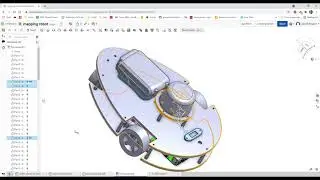
Open Source Mapping Robot - Mechanical
Open Source Mapping Robot - Intro
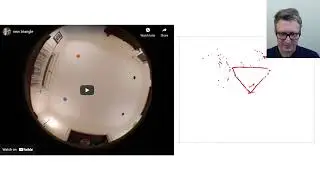
Optical three-point robot localization algorithm demo
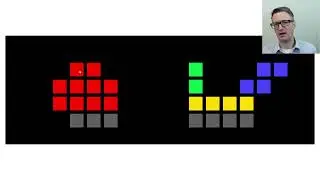
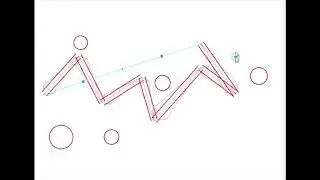
Blob finding algorithm
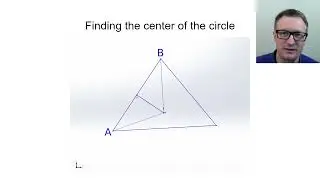
Finding the location and heading of a robot using three landmarks
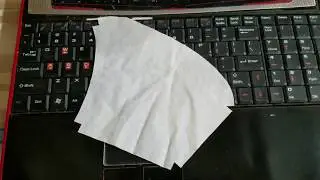
Fu face mask cut with a K40 laser
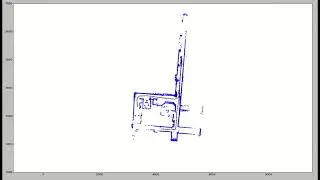
LIDAR only SLAM algorithm .
More complete IK solver
Preliminary Arm simulator program