Plant leaf tracking with a Kinect camera
Опубликовано: 26 Август 2011
на канале: Institut de Robòtica i Informàtica Industrial, CSIC-UPC
на канале: Institut de Robòtica i Informàtica Industrial, CSIC-UPC
893
2
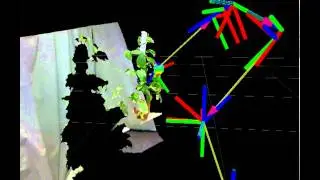
A kinect camera is attached to a WAM arm, and a the leaf of the plant is tracked over the sequence. This is the visualization of the process: the robot structure moving and the colored point cloud.