Estirabot robot - Cleaning board
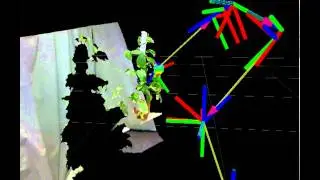
Eary work on detecting draws on the board and make the robot clean them in a efficiently way.
Wrok done by David Martínez in the IRI Perception Lab.
Eary work on detecting draws on the board and make the robot clean them in a efficiently way.
Wrok done by David Martínez in the IRI Perception Lab.




![[4K] Rolex Datejust 41 Vs Day-Date 40, DJ41 Mint Green vs DD40 Olive Green | Hafiz J Mehmood](https://images.mixrolikus.cc/video/qQlj598gU-0)