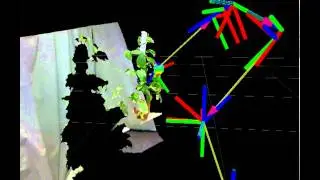
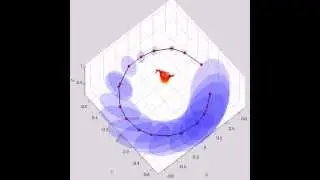
3D modelling of leaves from color and ToF data for robotized plant measuring
Опубликовано: 26 Август 2011
на канале: Institut de Robòtica i Informàtica Industrial, CSIC-UPC
на канале: Institut de Robòtica i Informàtica Industrial, CSIC-UPC
382
2
Leaf perception using a ToF camera attached to a Wam arm. From the first view the robot decides to go closer to see more details of some selected leaves.
-----
G. Alenyà, B. Dellen and C. Torras. 3D modelling of leaves from color and ToF data for robotized plant measuring, 2011 IEEE International Conference on Robotics and Automation, 2011, Shanghai, pp. 3408-3414.