Circular Restricted 3 Body Problem (CR3BP) Introduction | Orbital Mechanics with Python 52
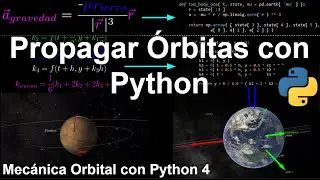
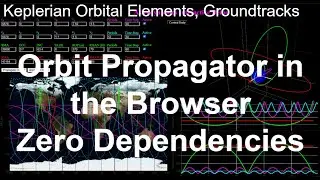
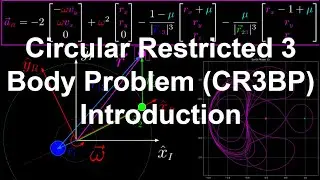
In this video we introduce the circular restricted 3 body problem in astrodynamics, starting with the geometry of the problem and the definition of the CR3BP rotating reference frame. We then get into the equations of motion in the rotating reference frame, where we must account for the coriolis, centrifugal, and gravitational accelerations as they are seen in the rotating frame. After that we’ll go into the non-dimensionalization of the problem so that we can define any restricted 3 body system with a single value (named mu). And finally to put everything together to arrive at the non-dimensionalized differential equations of motion of the circular restricted 3 body problem.
Amanda Haapala's Graduate Level Thesis: https://engineering.purdue.edu/people...
Richard Battin's book: https://arc.aiaa.org/doi/10.2514/4.86...
In this problem, we assume that all that exists in the universe are 3 bodies. One has the largest mass (in the blue which we’ll call m1), one has a smaller mass (in the green which we’ll call m2), and one has no mass, which will be the spacecraft. Since there are only 2 objects with mass in this problem, they follow the laws of the two body problem
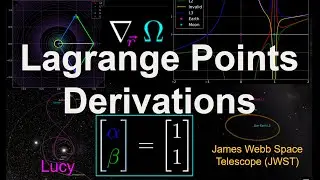
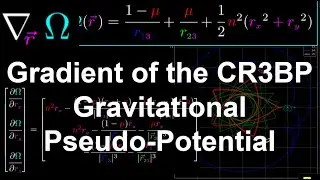
However in the 3 body problem we propagate the spacecraft trajectories in a rotating (or synodic) reference frame instead of an inertial one, since the differential equations of motion w.r.t the rotating frame possess a constant integral of motion (the Jacobi constant), which we’ll be deriving later in this series
#astrodynamics #cr3bp #crtbp


![PUMPKINAT0R | Reason 2 Die [REMIX]](https://images.mixrolikus.cc/video/dkQtOCyWSCg)