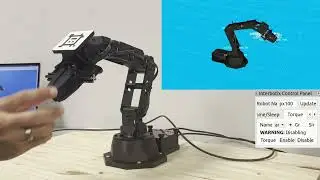
Vision‐Aided Screw Theory-based Numerical Inverse Kinematics of the Robot Arm Challenge #3
This is Maya's implementation of Project 2 ‐ Part 2: Vision‐Aided Numerical Inverse Kinematics of the PX100 Robot Arm for the Modern Robotics I course taught by Dr. Madi at SLU. She programmed the robot to pick up the cubes in the order she defined in the video.
Guidelines for implementation:
https://github.com/madibabaiasl/moder...
#machinevision #modernrobotics #robotics #screwtheory #slu #inversekinematics