Modern Robotics Lab 10 (Forward Kinematics Using PoE) Submissions (See description for the links)
Student submissions for lab 10 of the modern robotics course at SLU.
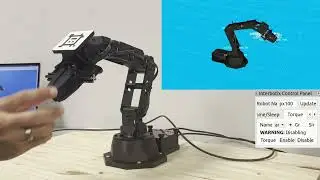
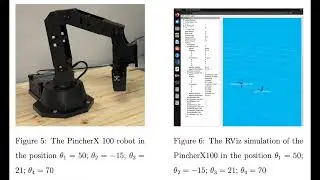
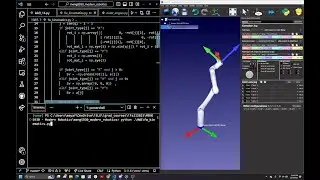
In lab 10, they calculated the forward kinematics of the PincherX 100 robot arm using the Product of Exponentials (PoE) formula based on screw theory and then validated it using the physical robot arm.
Here is the link to Lab 10: PincherX 100 Robot Arm's Forward Kinematics Using Screw Theory:
https://github.com/madibabaiasl/moder...
#forwardkinematics #modernrobotics #robotics #screwtheory #poe