UAV (1) Using RVOSD and FPV
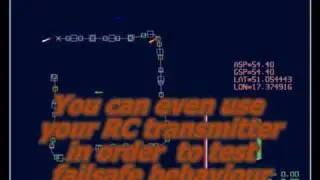
The video demonstrates testing of the IMU autopilot display module when flying in manual mode, known as FPV.
The use of autopilot allows accurate representation of artificial horison and enhanced quality GPS data.
This is only one of several methods to have fun with this autopilot fitted to electric RC plane. Other methods include increased safety of long range manual flights (thanks to automatic return home feature), data logging, aerial photography and amateur area surveillance thanks to automatic loiter after returning home.
The purpose of the tesing was to judge the roll angle in the following conditions:
1. The platform used had no pressure airspeed sensor as it is designed with durability in mind. This makes roll angle estimation much harder.
2. The platform (EasyStar) is using rudder only in order to spare weight of the servos and enhance durability. This guarantees that the turns are uncoordinated (imperfect) and again increasing the difficulty of roll estimation.
3. The flight dynamics is much more violent you should expect from typical rudder-only plane, it was achieved by enlarging the rudder surface 4 times.
[email protected]