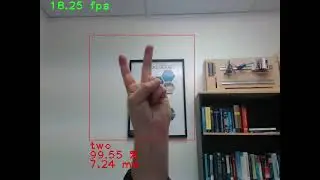
Recording from my mobile robot's point of view.
I have made a remote-controlled, mobile robot, which streams what it sees over a network. This video is an example.
The resolution of the video is low, 180 x 120, as encoding the image on the robot is a computationally intensive task, and if the resolution is any larger, causes significant delays.


![[RUS SUB] Сейю Чжун Ли озвучил Задание мира «Ход времён под сенью веера» || JP CV: Maeno Tomoaki](https://images.mixrolikus.cc/video/5_YfX_SM16I)